

Stanford's Humanoid Diving Robot Takes on Undersea Archaeology and Coral Reefs
From:IEEE Spectrum NetWriter:Evan AckermanDate:2016-05-03
If you were in the audience for Oussama Khatib’s IROS keynote in Hamburg last year, you may remember him talking about this crazy thing:We, of course, cornered Oussama immediately afterwards, because humanoid robotic submarine what?! It turned out that OceanOne, as it was called, was involved in a top secret (or something) project in collaboration with the French, which has (now that it’s over and wasn’t a disaster) been un-topsecretified so we can finally, finally tell you about it.
Originally, OceanOne was not an archaeological robot—it was conceptualized by King Abdullah University of Science and Technology (KAUST) in Saudi Arabia as a way of monitoring deep coral reefs in the Red Sea. Christian Voolstra, assistant professor of marine science at KAUST’s Red Sea Research Center, explained where the idea came from in an interview last year:
Currently people use a so-called ROV (remote operated vehicle), which is a little submarine with two robotic arms and very limited dexterity. Using the ROV to examine delicate coral colonies proved to be troublesome. Prof. Khaled Salama (who is a professor in KAUST’s electrical engineering division) knew people at Stanford University who might be able to aid us in creating a new robotic interface system. We got in touch with the Stanford team and told them that we were not happy with the engineering solutions that are currently available. They said, “Ok, we know how to build robots … why not build an underwater robot?”
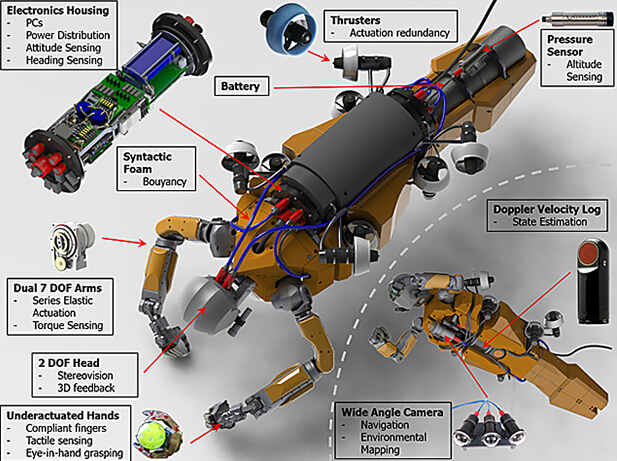
OceanOne is different from, and arguably better than, traditional underwater ROVs for a bunch of reasons. It’s smaller, approximately the size of a human diver (about 5 feet in length), which helps keep it nimble. Rather than waterproofing the electronics to keep air in, they’re immersed in oil instead, which doesn’t compress, giving the robot a maximum depth of 2000 meters (!). OceanOne is designed to maneuver with precision in tight spaces using eight thrusters, and can autonomously keep itself stable in currents or surge. With current underwater vehicles, “you spent the majority of time keeping the robot stable,” Dr. Voolstra told IEEE Spectrum, “rather than focusing on the research task.”
The robot’s most prominent feature is its pair of compliant, series-elastic arms, which apparently represent the very last project that Meka Robotics delivered before it was absorbed by Google. The wrists have force sensors in them, and eventually, the plan is to cover each finger with tactile sensors as well. With arms, hands, and a head stuffed with sensors, OceanOne is proportioned a lot like a human, which is one of the reasons it’s so revolutionary over existing ROVs.
With a traditional ROV, you’ve got this enormous boxy submarine thing with maybe a couple grabby arms on it. It’s functional for things like oil rigs, but around delicate coral or underwater archaeological sites, it’s not something that you can trust to not destructively smash into whatever you’re trying into examine. And the manipulators aren’t intuitive to use, and don’t provide the level of control or feedback that enable careful manipulation of fragile objects.
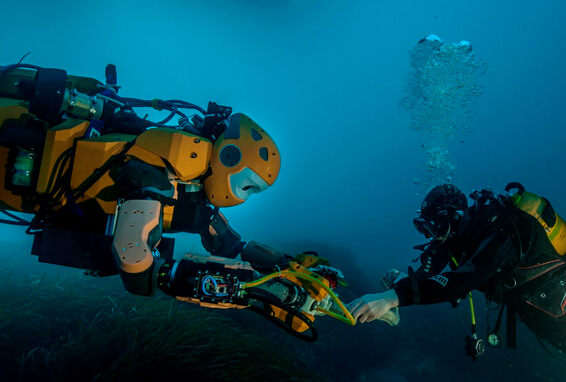
OceanOne takes a new approach to underwater robotics: telepresence. It’s designed kind of like a human, because that makes it super easy for humans to use. The perspective that OceanOne’s sensors give a user is similar to the perspective that your face has in relation to your own arms. Using haptic feedback, gripping objects without crushing them becomes simple and intuitive, even for people without a lot of experience.
This, in general, is one of the arguments for making robots more like humans, even if it’s a design compromise that adds complexity while de-optimimizing the robot for whatever task it’s intended for. If you’re trying to (say) lift a piece of pottery out of a shipwreck, having two arms and a sense of touch is ideal, as long as a human is in the loop. It may not the be best approach for a fully autonomous system, but for OceanOne (at least for the foreseeable future), it’s working out very well.
OceanOne’s first mission was to La Lune, the ex-flagship of King Louis XIV which sank 20 miles off the southern coast of France in 1664 in about 100 meters of water. One hundred meters may not sound like a lot, but the SCUBA expert we consulted told us that you’re unlikely to find a human down there without an enormous amount of training and lots of special equipment to keep them from dying. Happily, the robot seemed to have no trouble at all. From the press release:
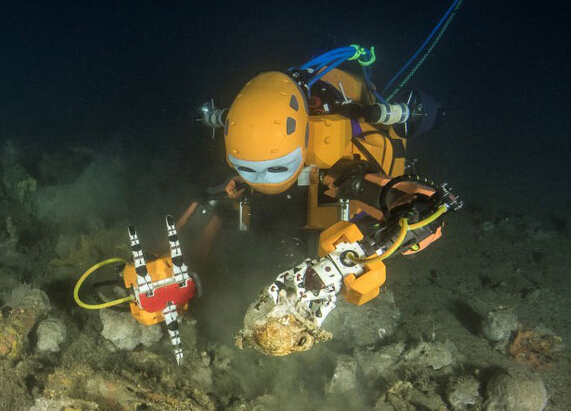
With guidance from a team of skilled deep-sea archaeologists who had studied the site, [Oussama] Khatib spotted a grapefruit-size vase. He hovered precisely over the vase, reached out, felt its contours and weight, and stuck a finger inside to get a good grip. He swam over to a recovery basket, gently laid down the vase and shut the lid. Then he stood up and high-fived the dozen archaeologists and engineers who had been crowded around him.
“We connect the human to the robot in very intuitive and meaningful way. The human can provide intuition and expertise and cognitive abilities to the robot,” Khatib said. “The two bring together an amazing synergy. The human and robot can do things in areas too dangerous for a human, while the human is still there.”
Khatib was forced to showcase this attribute while recovering the vase. As OceanOne swam through the wreck, it wedged itself between two cannons. Firing the thrusters in reverse wouldn’t extricate it, so Khatib took control of the arms, motioned for the bot to perform a sort of pushup, and OceanOne was free.
OceanOne is still a prototype, and Dr. Voolstra from KAUST explained that “our plans are to conduct a number of experiments that highlight in particular the bimanual dexterity and sensitivity of the robot, showcasing its ability to conduct research.” Once the robot has proved itself, Voolstra hopes to use it to study mesophotic coral reefs, which live too deep for humans to explore with SCUBA gear but get passed over in “deep ocean” research. These reefs are very poorly understood, but as coral reef cover around the world shrinks, they may offer a unique coral refuge, says Voolstra:
What we plan in particular is in situ physiological studies of coral reefs at depth. For instance, in situ fluorometric measurements of different coral species over depth gradients will provide information on low-light adaptation and production potential of mesophotic coral specimens. The current practice to study living things in the deep is to collect them and bring them up to the surface, but this means that you take things out of their natural context. Up until now, we were not able to study things undisturbed in their natural habitat.
We’re incredibly excited to see what happens with OceanOne. It represents a totally new approach towards underwater manipulation, and it’s very cool-looking, which doesn’t hurt either. The press release suggests that we may be seeing a whole fleet (school? wolfpack?) of these robots all working together, either doing some serious research or pulling an underwater chariot just like in The Little Mermaid. Hey, a guy can dream, right?